

This article was submitted through the GetFPV Community Program by Aidan Henriques.
Disclaimer: This article was written solely by a member of the FPV Community. Views and advice in this article are that of the author and does not necessarily reflect the opinion or views of GetFPV. You can follow Aidan on Instagram or YouTube.
I recently began a journey of testing in Betaflight 4.2 to achieve the least amount of propwash possible on my 5-inch freestyle drone. This resulted in a few interesting findings especially the outstanding amount that software can impact your flight performance. I have developed the best settings possible to make your quad fly the best it can, but before we start, I would recommend changing one of these settings at a time, so that if for some reason a problem were to occur, you would be able to pinpoint it and reset it to default.
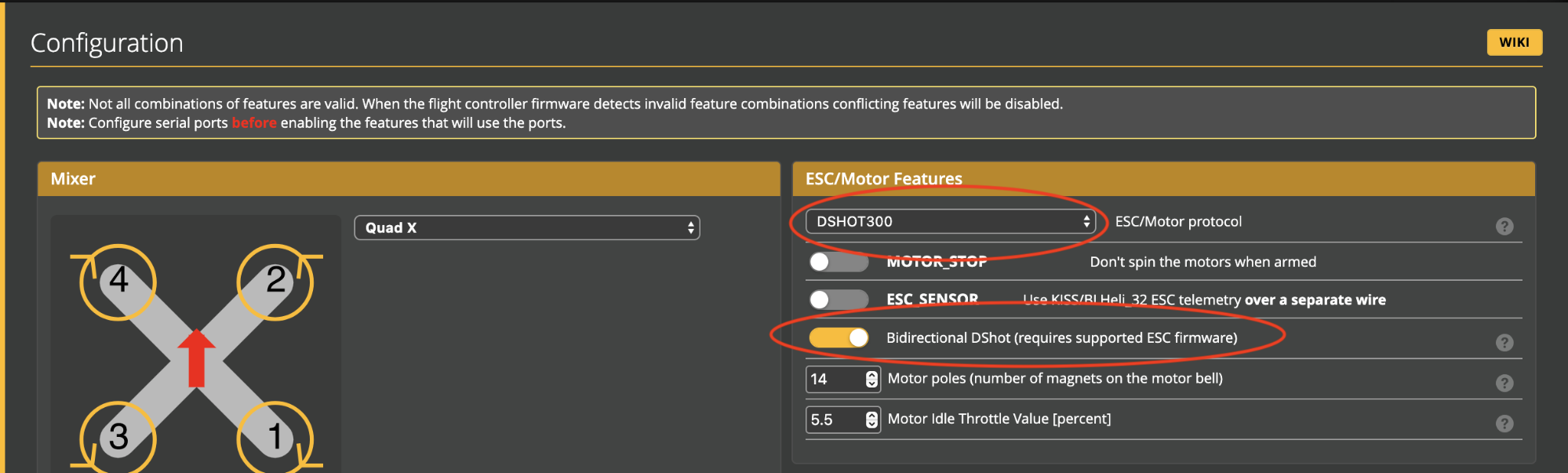
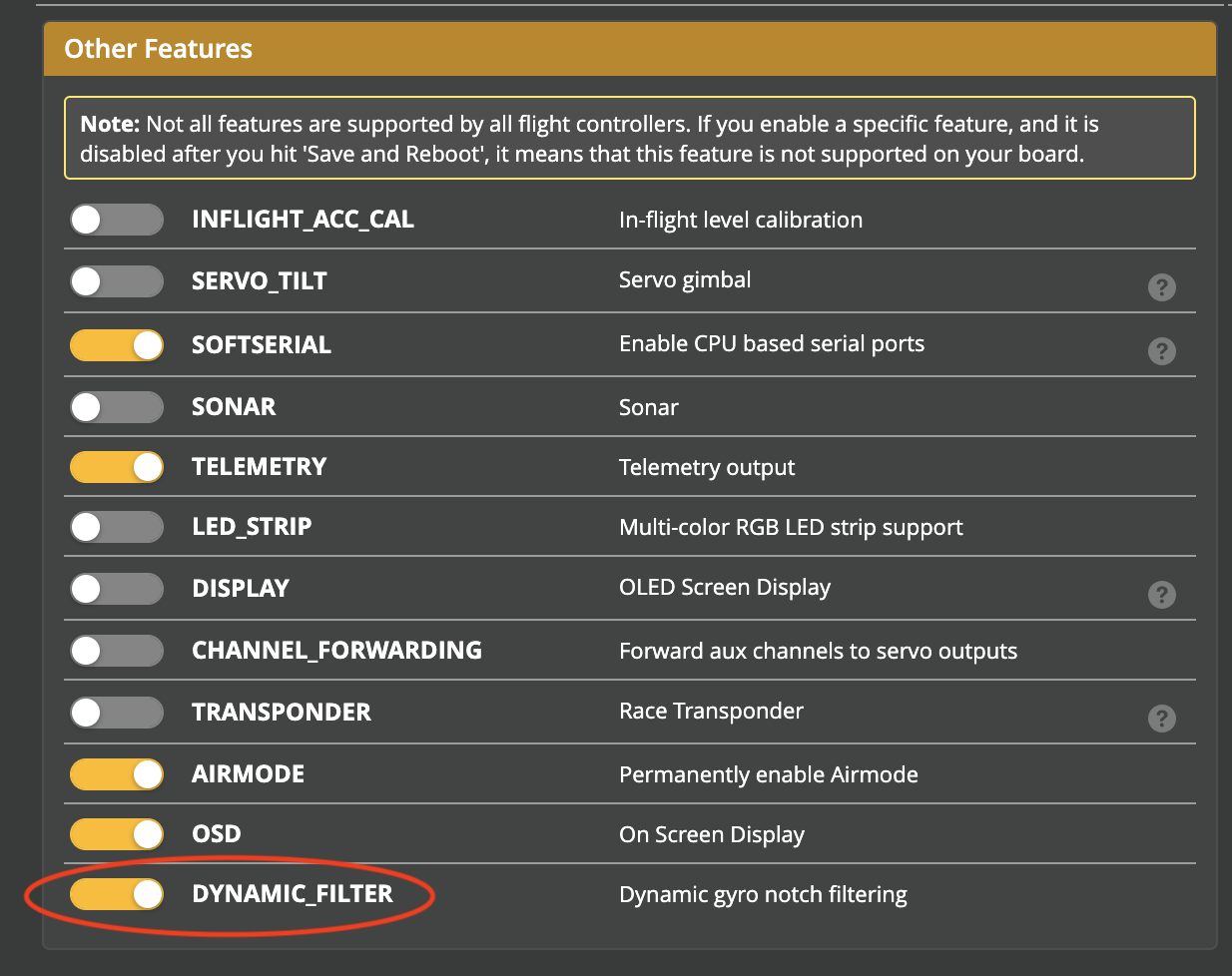
Firstly, you are going to want to head over to the configuration tab and toggle DSHOT 300 if supported by your ESC as well as bi-directional DSHOT. You can find your ESC’s compatibility on the manufacturer’s website. It is better to select DSHOT 300 in comparison to something like DSHOT 600 as it results in less noise going to the motor as well as it is less intensive processor wise. Additionally, the difference in latency between DSHOT 300 and DSHOT 600 is only 25 nanoseconds with DSHOT 600 running at a speed of 25 nanoseconds and DSHOT 300 running at a speed of 50 nano-seconds. This difference is so slim that it is not worth stressing your electronics even more for that little bit more latency. Additionally, DHOT 600 can allow you to run 8kHz meaning that you can send more packets, taking full advantage of that lower latency. I have not had any issues with lost packets yet, (on DSHOT 300) so for now, I will be sticking with DSHOT 300 due to the lower noise and less intensive processing. If you are confident in your electronics, feel free to go for DSHOT 600 and increase your kHz under the “System Configuration tab” (the Gyro update frequency and PID loop frequency) in the Configuration tab. For running DSHOT 300 you can run 4kHz for both and for DSHOT 600 you can run 8kHz for both. You will also need to enable Dynamic_Filter. You can do this by going to the Configuration tab, then scroll down to “Other Features” and toggle on Dynamic_Filter.
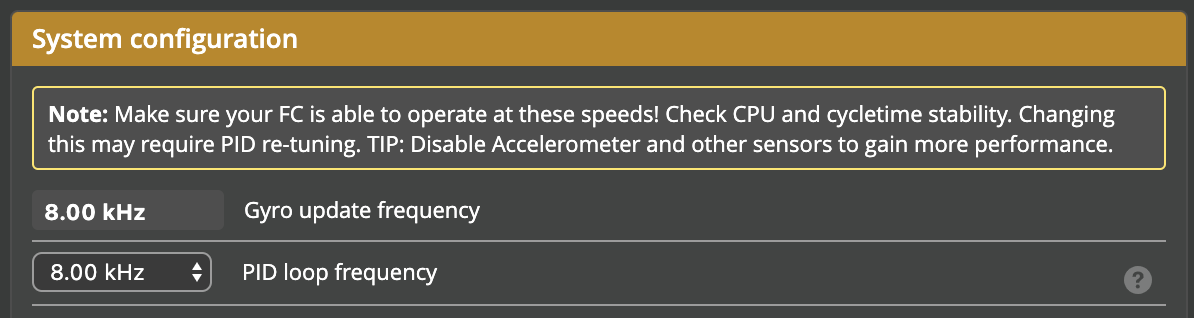
(or 4kHz 4kHz, depending on your preference)
Next, head over to the PID tuning tab and then select the Filter settings tab.

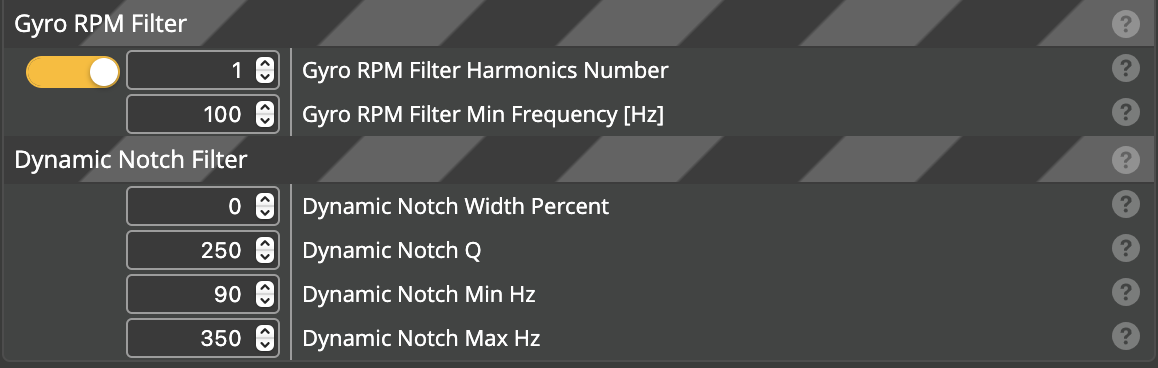
Now, in the Filter Settings tab, scroll down to where it says “Gyro RPM Filter”. This tab will only appear if you have bi-directional DSHOT enabled. Set the Gyro Harmonics number to 1. This will allow for less latency in the commands to the motors as well as less filtering of the gyro data from the flight controller to the motors. I have not found any benefit to putting this number higher than three in my testing. I would recommend staying at 1 for the best propwash reduction. Next, make sure that the number right under the “Gyro RPM Filter Harmonics Number” tab is set to 100. Below the “Gyro RPM Filter” tab there is a tab called “Dynamic Notch Filter”. Head over there and set the “Dynamic Notch Width Percent” to 0, the “Dynamic Notch Q” to 250, the “Dynamic Notch Min Hz” to 90, and the “Dynamic Notch Max Hz” to 350. If you would like further explanation as to what each of these values does please hover over the question mark on the right side of the value. Below is a screenshot of everything discussed in this paragraph if you would just like to copy it down.
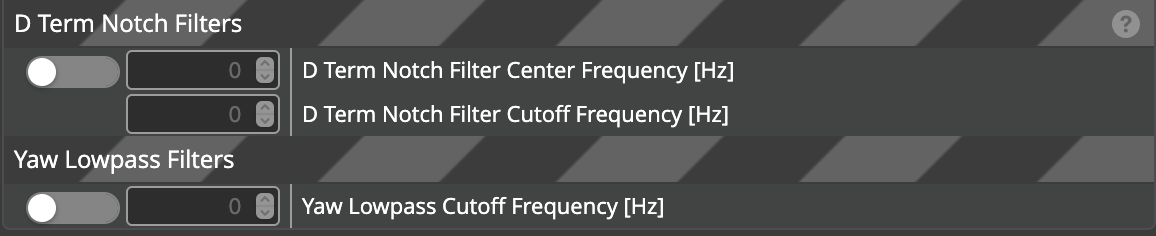
Before we move into the filter sliders, make sure you have the “D Term Notch Filters” and “Yaw Lowpass Filters” settings on the right-hand side switched off.
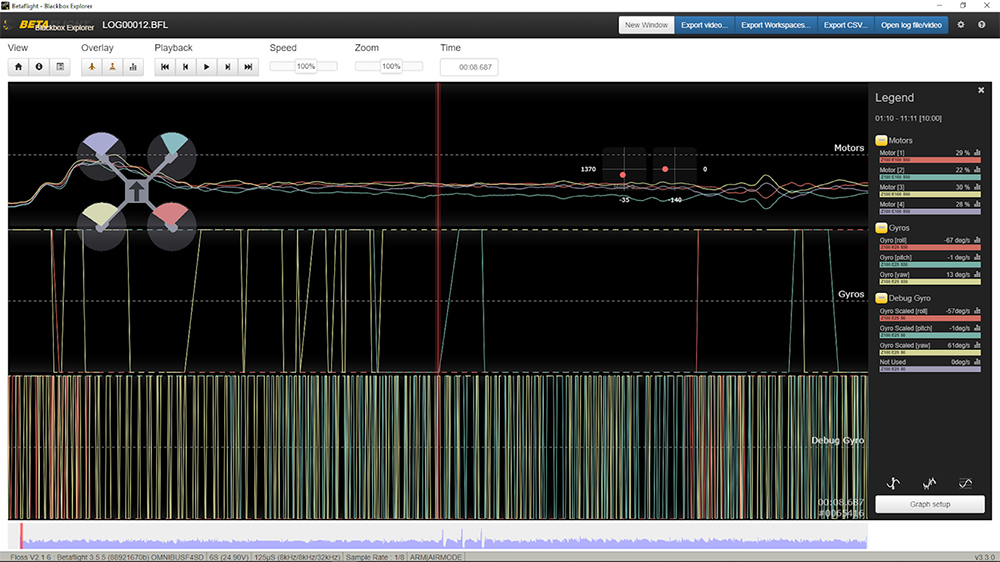
Now, I would recommend you go out and do a test flight before starting this next step to make sure that everything is working normally. Additionally, look out for how much propwash you are getting and if there is any improvement. If it is all gone, then you can skip this last step, however, if you are still getting some propwash, read ahead. After testing, we are now going to modify the filter sliders. These filter sliders are going to reduce the amount of filtering impacting the motors, resulting in less delay, ultimately reducing propwash even further. Your filters will appear like this at the start.

What you are going to do now is move the filters together towards the “Less Filtering” or red-colored side. This will make the number value on the right side of the screenshot above increase. Do this one tick at a time each time checking for hot motors and propwash. If your motors are too hot for you to touch for a few seconds, stop and go back a notch. The hot motors can result in the burning of your motors, meaning you would have to replace them. There is nothing to worry about if they are just a little bit warm, that is normal. Keep moving those sliders and testing until you are either happy with the propwash performance, or the motors get too hot, whichever comes first. It is also worth mentioning that you will have to be in expert mode to move the sliders as far as it shows in the screenshot above. You can toggle on expert mode in the top right corner of Betaflight, just to the left of the “Update Firmware” button. I hope this article helped you reduce your propwash and allows you to get even smoother and better flying.
It’s possible to do in 3inch too?
I might be completely wrong, as I haven’t tested yet cause it’s raining, but I think where it says DYNAMIC NOTCH MIN – 90 and MAX – 250, I have a feeling these values will change higher the smaller your quad. ie – a “tinywhoop” would have a minimum of say 300 and max value of around 700. 3in would be something like min 150 and max 500. But each quad will be different.
Gonna be a bunch of experimenting, by that I mean back up, change one thing, save, fly, repeat… until something beautiful happens.
Great article! Helped a lot with my diatone taycan 3 inch! Thanks!!
Hello, I am running a 5 inch with mamba stack F4. All of these settings made it fly worse. I was running Dshot6oo 8k,8k with a 3 Harmonics number. The Dshot300 with 8k,4k and a 1 harmonics DOUBLED my propwash. Dshot 600, 8k,8k with a 1 Harmonics number made my motors screch and get hot fast. So I put it back to where I had it and now it flies GREAT again.
DIDNT WORK FOR MY QUAD!
“For running DSHOT 300 you can run 4kHz for both”
Looks like you missed the recommended configuration. For an F4 that is probably where you should be.
I just did all of this to my 5 inch Geprc MK4 frame, HIFIONRC F7 AIO blheli_S ESCs with the JESC firmware installed, Velox 2207 2550kv motors and carrying a Vista unit and a Gopro Hero 9 and 1550mah 4s battery. Almost all of the propwash is gone. The motors are warm, but they were always warm after a flight. Maybe a touch warmer than before but not at all too hot to touch. No burnt smell coming from them either. This really seems to have helped based on test flights in the neighborhood. I’ll know more when I get to a field and have more room for more maneuvers.
After flying in a large field I noticed my quad dips on throttle punches and has some weird oscillations that cause jello in both my Caddx Vista and even in my Hero 9 with Hypersmooth turned on. I put the filter settings back to what they were originally and those problems are gone. Motors are a little cooler after a flight but I have a little more prop wash. So these settings for me did help prop wash, but they caused new problems that were less desirable to have.