

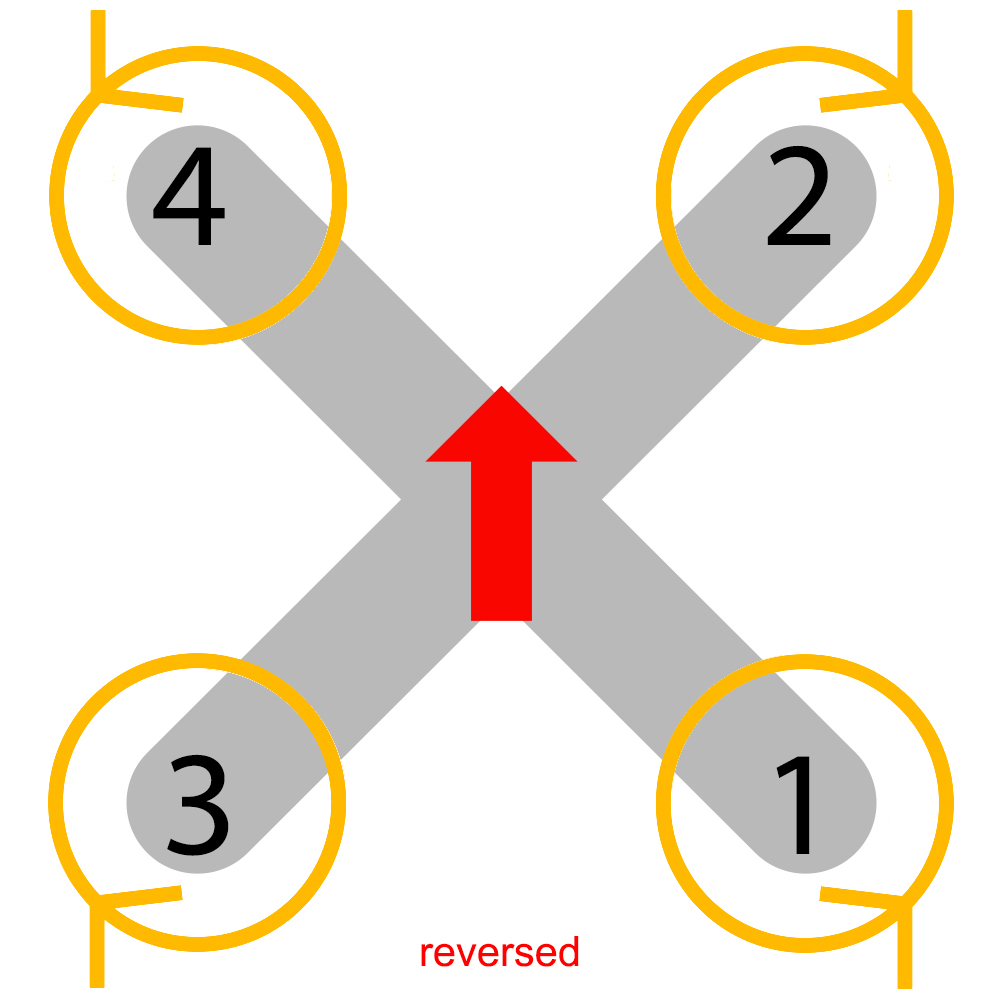
[vc_row][vc_column][vc_column_text]Have you ever tried reversing the motor direction on your quad? There can be many benefits to doing so. In this simple tutorial, I will go through the steps necessary to reverse your propellers, also known as running the quadcopter “props out”. Essentially, flying with “props out” means that instead of your propellers spinning in towards the front of the quad, they spin out away from the front of the quad.[/vc_column_text][/vc_column][/vc_row][vc_row][vc_column width=”1/2″][vc_single_image image=”4353″ img_size=”medium” add_caption=”yes” alignment=”center” onclick=”link_image”][/vc_column][vc_column width=”1/2″][vc_single_image image=”5520″ img_size=”medium” add_caption=”yes” alignment=”center” onclick=”link_image”][/vc_column][/vc_row][vc_row][vc_column][vc_column_text]
This article was submitted through the GetFPV Community Program by Lawrence Ro.
Disclaimer: This article was written solely by a member of the FPV Community. Views and advice in this article are that of the author and does not necessarily reflect the opinion or views of GetFPV.
[/vc_column_text][/vc_column][/vc_row][vc_row][vc_column][vc_column_text]
Benefits
Now, why do we want to run “props out” and what benefit does it give us FPV pilots? The most notable difference may be observed in micro quads, specifically those 3 inches and below. During a high-speed turn, the aircraft may “dip” or “washout” in the corner due to air turbulence during the yaw turn. Some early BetaFPV “whoop” class quads used to have this problem, which was fixed via the “props out” configuration.
Another way that the props out configuration benefits flight is that the FPV camera is less likely to be damaged or get dirty in a crash. The reason for this is because since the propellers are spinning away from the camera, they will automatically push dirt, leaves, and other debris that get in the way while flying. So, when you happen to crash into that ghost branch at 7 PM that you couldn’t see, the outward spinning props may be helpful in directing the leaves and branches out of the way to enable your quad to get through.
Furthermore, the props out configuration may theoretically be a little more efficient than the tradition props in configuration. This is because the opposite spinning props change the center of thrust from outwards to inwards, so there is a bit less air turbulence towards the rear end of the quad.[/vc_column_text][/vc_column][/vc_row][vc_row][vc_column][vc_column_text]
Downsides
However, the props out configuration may not be the best for larger quads, due to the fact it may compromise the amount of debris that can get into the side of the aircraft. The outward spinning motors on both ends of the quad can fling dirt and leaves into the flight controller and FPV system, compromising both cleanliness and reliability during flight. This is not too much of a big deal, but it is a caution that must be noted.
One solution to this problem is to either use side plates on your frame to protect the electronics, or to put a small cap over the USB port on the flight controller so that the port doesn’t get jammed with debris.
Also, while the aircraft is in turtle mode, the motors are spinning in the opposite direction, facing towards the ground. This means that it is even more likely that dirt will get into the camera lens before the quad flips over.[/vc_column_text][/vc_column][/vc_row][vc_row][vc_column][vc_column_text]
Setting up
The first step to do is to go into Betaflight and select “Motor direction is reversed” in the Configuration tab. This will tell the flight controller that the clockwise (CW) spinning propellers will now spin counter-clockwise (CCW) and the CCW spinning ones, CW.[/vc_column_text][/vc_column][/vc_row][vc_row][vc_column][vc_single_image image=”5572″ img_size=”full” alignment=”center” onclick=”link_image”][/vc_column][/vc_row][vc_row][vc_column][vc_column_text]Next, go into the BLHeli configurator after disconnecting from Betaflight and check the boxes indicating that the motors are reversed. After that, simply flash your ESCs again to save changes. This would also be a great time to update the firmware on the ESCs if you haven’t done so in a while![/vc_column_text][/vc_column][/vc_row][vc_row][vc_column][vc_single_image image=”5573″ img_size=”full” alignment=”center” onclick=”link_image”][/vc_column][/vc_row][vc_row][vc_column][vc_column_text]Alternatively, you could simply re-solder two of the wires from each motor. Simple swap any two motor wires for each motor to reverse the direction. Some soldering may be necessary, but if flashing the firmware seems unappealing to you, then swapping motor wires will work just as well.[/vc_column_text][/vc_column][/vc_row][vc_row][vc_column][vc_single_image image=”5574″ img_size=”full” alignment=”center” onclick=”link_image”][/vc_column][/vc_row][vc_row][vc_column][vc_column_text]Finally, and probably the most important step to reversing props, is to switch the propellers. Basically, all CW spinning props should be replaced with CCW ones, and vice versa.
There you go! Now all that’s necessary is to arm the quad, do a hover test, and then go and fly! I personally use the props-out configuration on all quads 3 inches and below because it gives much improved cornering and yaw washout. On larger 5-inch builds and above, the props-out configuration may not make much of a difference, as it ultimately comes down to personal preference and convenience.[/vc_column_text][/vc_column][/vc_row][vc_row][vc_column][vc_single_image image=”5575″ img_size=”full” alignment=”center” onclick=”link_image”][/vc_column][/vc_row][vc_row][vc_column][vc_column_text]
Conclusion
In conclusion, the props-out way of setting up your aircraft is an important tool necessary for all micro builds. Also, the ability to quickly and easily swap propeller direction is a critical skill. It is easy to do, gives better handling for micros, and keeps debris out of the way of the camera. Give it a try. You just might be surprised on how much better your quad flies![/vc_column_text][/vc_column][/vc_row]